In this type, the mechanisms converts the movement from the driver element into a movement that the driven element can use. The examples are: Screw and nut, rack and pinion, cams and eccentric.
Screw and nut
This mechanism consists of a screw and a nut. The rotatory motion of the nut is converted in forward linear motion in the screw.

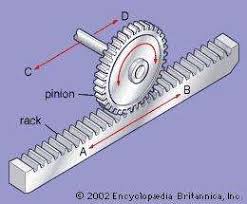
Rack and pinion
This mechanism consists of a pinion that meshes with a rack.
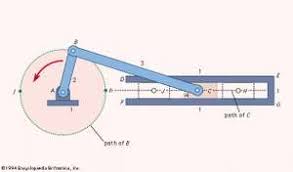
Crank and slider
This mechanism consists of a connecting road that is connected at one end to a crank.